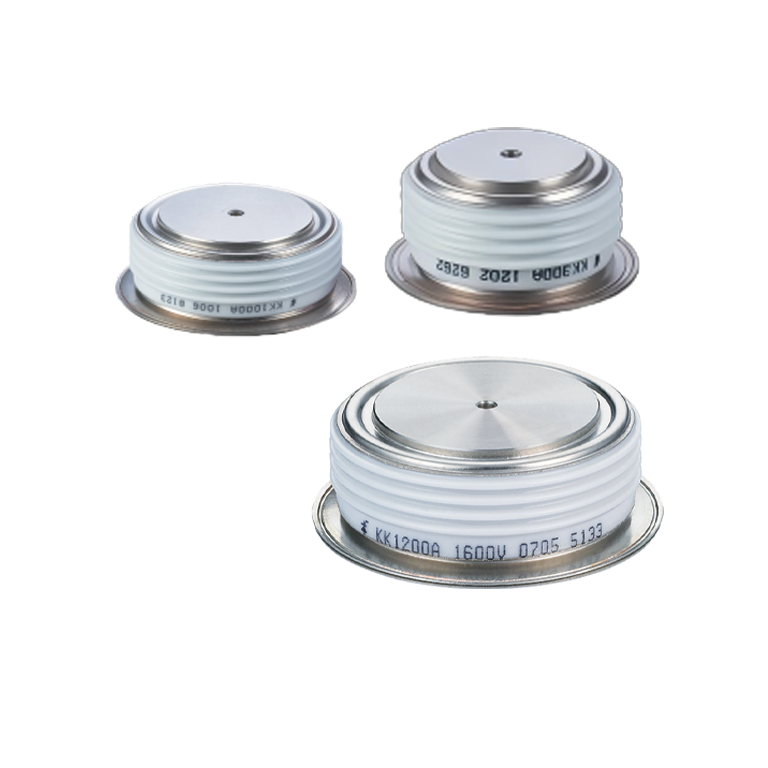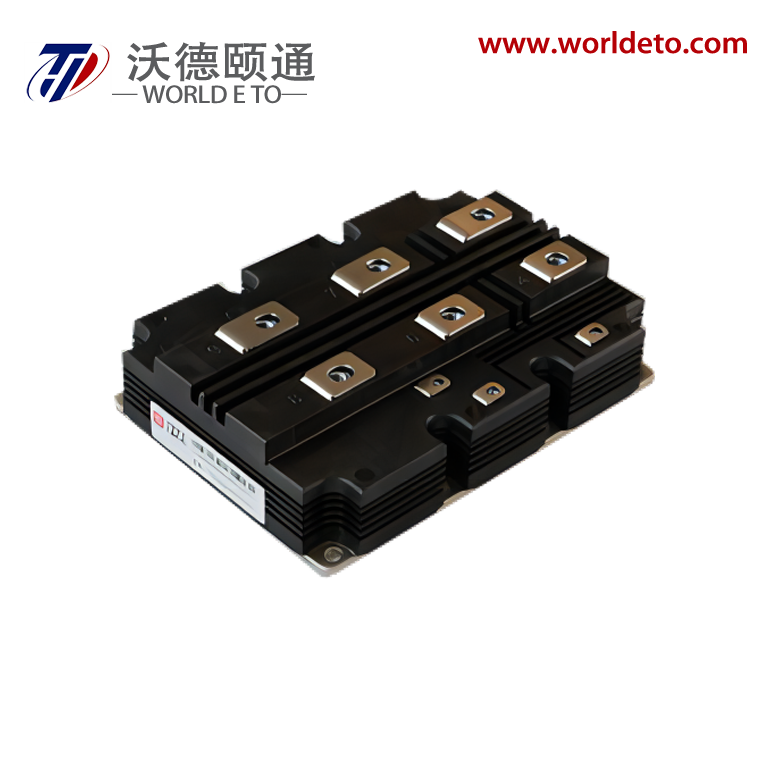
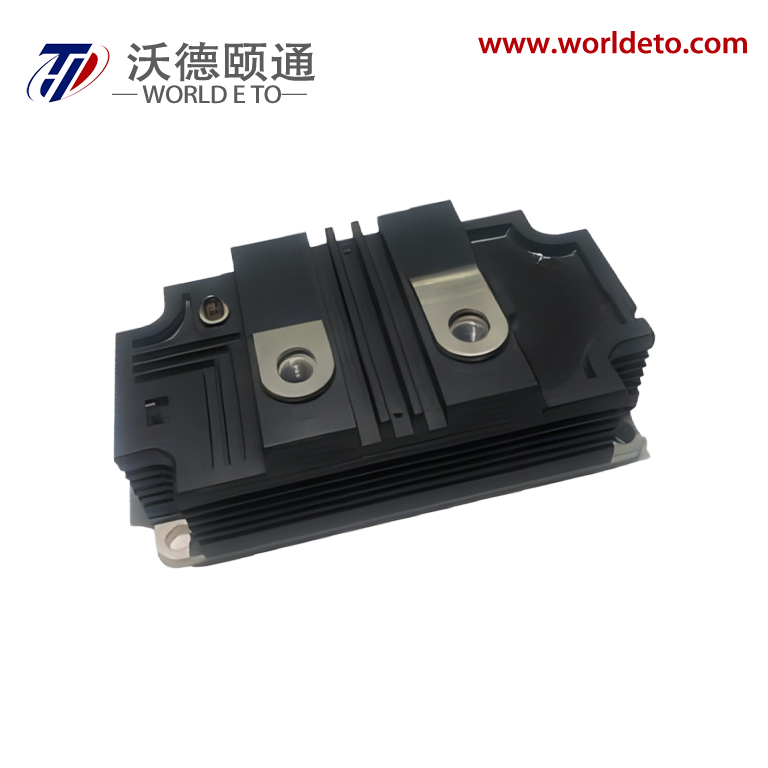
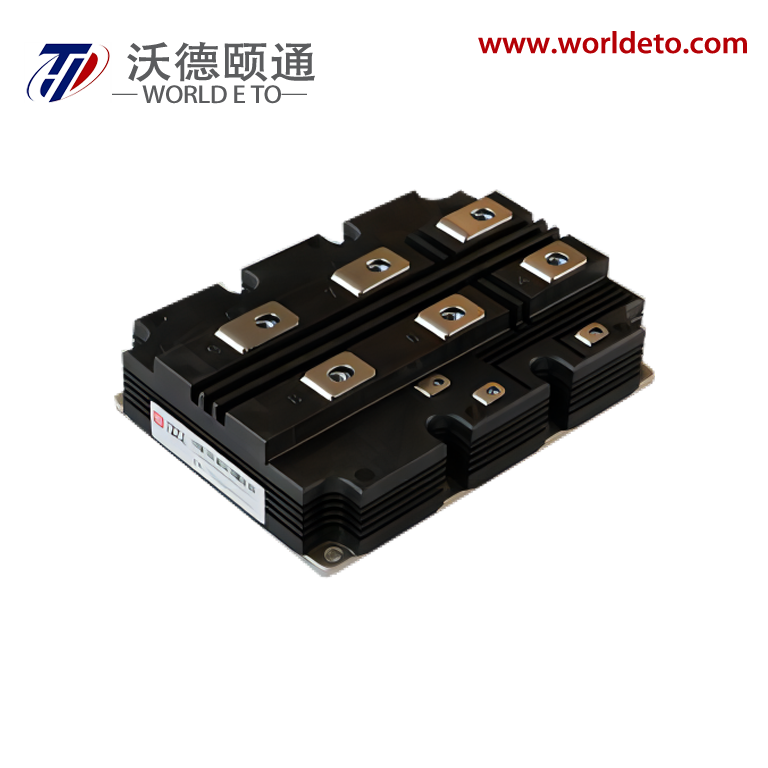

자동차 전자기기용 IGBT 모듈: 전기차의 미래를 이끌다
전기차 파워트레인에서의 IGBT 모듈의 핵심적 역할: IGBT 모듈이 에너지 변환 효율성을 어떻게 실현하는가 IGBT 모듈은 전기차의 에너지 변환 효율성을 향상시키는 데 있어 필수적인 구성 요소이다. 기본적으로 기능...
더 보기

11
Apr
21
May
20
Jun
20
Jun